Distributed generation network
Sorry, this entry is only available in Japanese.
Evolutionary algorithm
Sorry, this entry is only available in Japanese.
Trident snake robot
Trident Snake Robot [flv:2013/04/2step_rot_cw.flv 320 240] [flv:2013/04/2step_trans_down.flv 320 240] Rotation control Translation control [flv:2013/04/1step_rot.flv 320 240] [flv:2013/04/ptop.flv 320 240] Rotation control (1 step) Point-to-Point feedback control
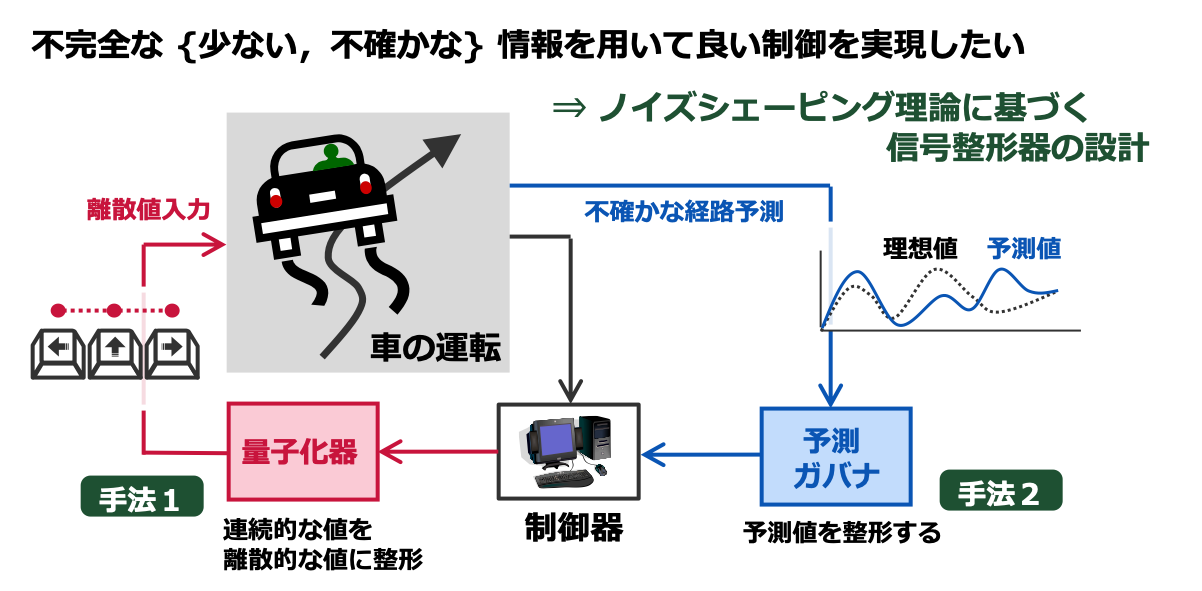
Dynamic Quantizer
Quantized Control We focus on the design of dynamic quantizers which convert continous-valued input signals to discrete-valued ones. Application to the discrete-valued input control of mechanical systems Seesaw-Cart system [flv:2013/04/seesaw_ideal.flv 260 180] [flv:2013/04/seesaw_input_dq.flv 260 180] [flv:2013/04/seesaw_input_sq.flv 260 180] Continous-valued input case (Ideal case) Discrete-valued input control with dynamic quantizer Discrete-valued input control with static quantizer