
更新履歴
2025.11.25 正誤表を更新しました
2025.5.26 正誤表を更新しました
2024.12.20 第1版第3刷になりました
2023.11.11 正誤表を更新しました
2022.6.29 正誤表を更新しました
2022.6.23 正誤表を更新しました
2022.6.19 正誤表を更新しました
2022.5.15 第1版第2刷になりました
2022.4.12 正誤表を更新
2021.12.10 第1版第1刷が発行されました
2021.12.7 サポートページ公開
2021.10.24 サポートページプレ公開
2021.6.5 書籍出版準備中
概要
- 著者:南裕樹,石川将人
- 出版社:コロナ社
- 出版日:2021年12月10日
(第1版第1刷)
本書は,モノの動きをデザインするための方法をまとめた制御工学の教科書です.制御工学のスペシャリストとしての素養を身につけたい,断片的に知っている制御工学の知識を整理したい,辞書的な書籍を手元においておきたい,そんな人におすすめの一冊となっています.
学習モデル(シラバス)
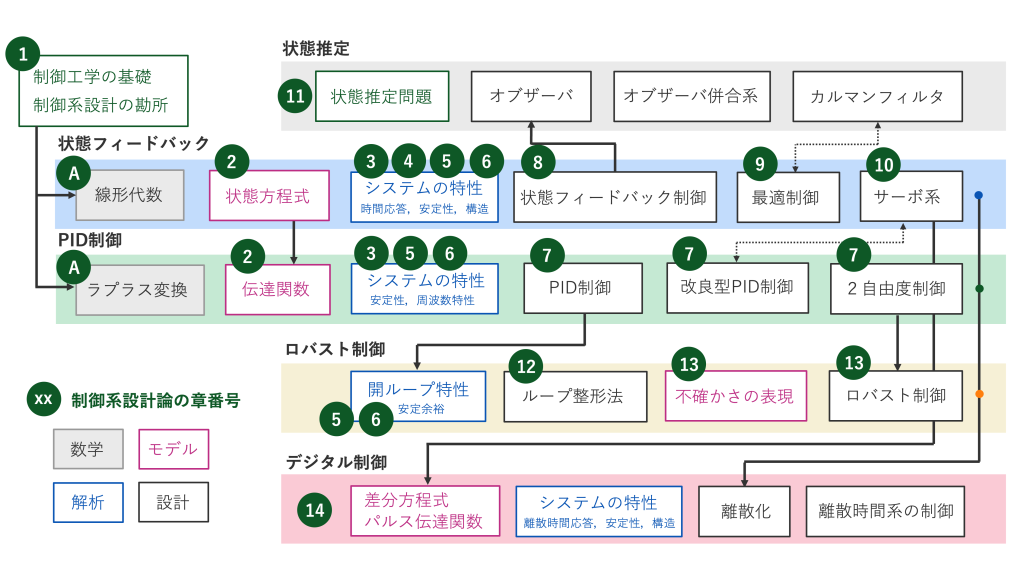
本書は,制御系設計の講義だけでなく,古典制御や現代制御,ロバスト制御の講義の教科書として利用できます.
各単元の該当ページを記載したシラバスを作成しています.
章末問題の解答
本書には,解答を記載しておりません.各章の章末問題の詳解はこちらからダウンロードしてください.
解答は進化していくかもしれませんので,定期的にチェックしていただければ幸いです.
Python&Matlabコードリスト
書籍の図を作成するときに利用したコードや補足説明のためのコードを公開します.
自分でプログラムを作成するときの参考資料としてお使いください.
なお,開発環境によっては,正常に動作しないかもしれません.不具合に対するサポートはいたしません.
| テキスト | Python | Python | Matlab |
|---|---|---|---|
| 2章のコードリスト | nbviewer | Colab | Matlab Drive |
| 3章のコードリスト | nbviewer | Colab | Matlab Drive |
| 4章のコードリスト | nbviewer | Colab | Matlab Drive |
| 5章のコードリスト | nbviewer | Colab | Matlab Drive |
| 6章のコードリスト | nbviewer | Colab | Matlab Drive |
| 7章のコードリスト | nbviewer | Colab | Matlab Drive |
| 8章のコードリスト | nbviewer | Colab | Matlab Drive |
| 9章のコードリスト | nbviewer | Colab | Matlab Drive |
| 10章のコードリスト | nbviewer | Colab | Matlab Drive |
| 11章のコードリスト | nbviewer | Colab | Matlab Drive |
| 12章のコードリスト | nbviewer | Colab | Matlab Drive |
| 13章のコードリスト | nbviewer | Colab | Matlab Drive |
| 14章のコードリスト | nbviewer | Colab | Matlab Drive |
Anacondaを利用されている場合は, > conda install -c conda-forge control でライブラリをインストールしてください pipでインストールする場合は, > pip install control > pip install slycot (option) としてください Python環境の構築についてはこちらを参考にしてください
Colab (Google Colaboratory) では,【ドライブにコピーを保存】してから作業を開始してください. そして,最初に,!pip install control(と!pip install slycot)を実行してください.
[box class=”pink_box” title=”無料でMATLABコードを実行”]
MATLAB Mobile を利用すると,無料でMATLABコードを実行し確認することができます.使い方はこちら.
[/box]
正誤表
自学自習用オンラインコンテンツ(準備中)
Matlab Grader のコースを準備中です.
解説動画(準備中)
講義動画の一部を公開しています.今後追加と整理をしていきます.