[:ja]
予測ガバナ
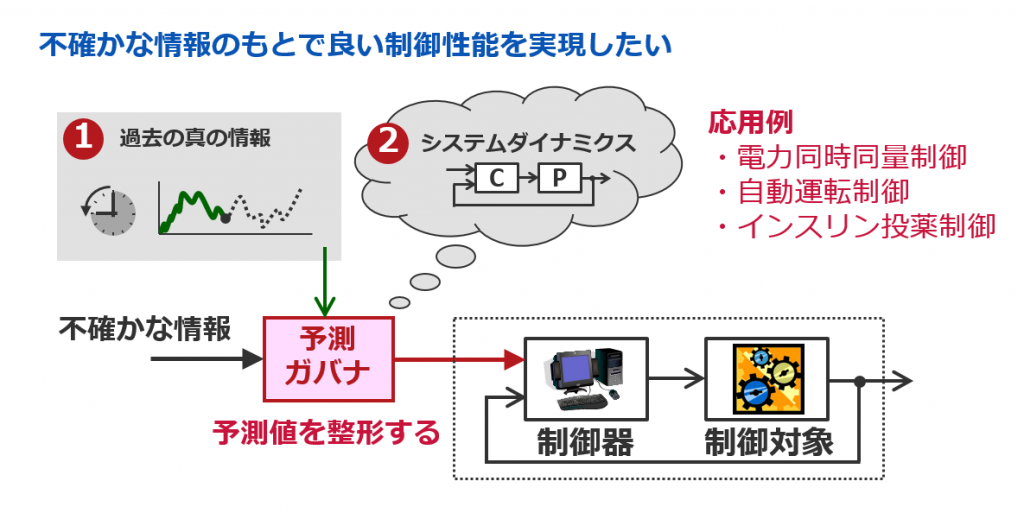
動的システムの追従制御において,従来は,参照信号が既知であることが前提となっています。これに対して,しばしば,参照信号が未知となる状況があります.そのような場合,未知信号を予測する必要がありますが,その予測精度が制御性能に影響を与えます.
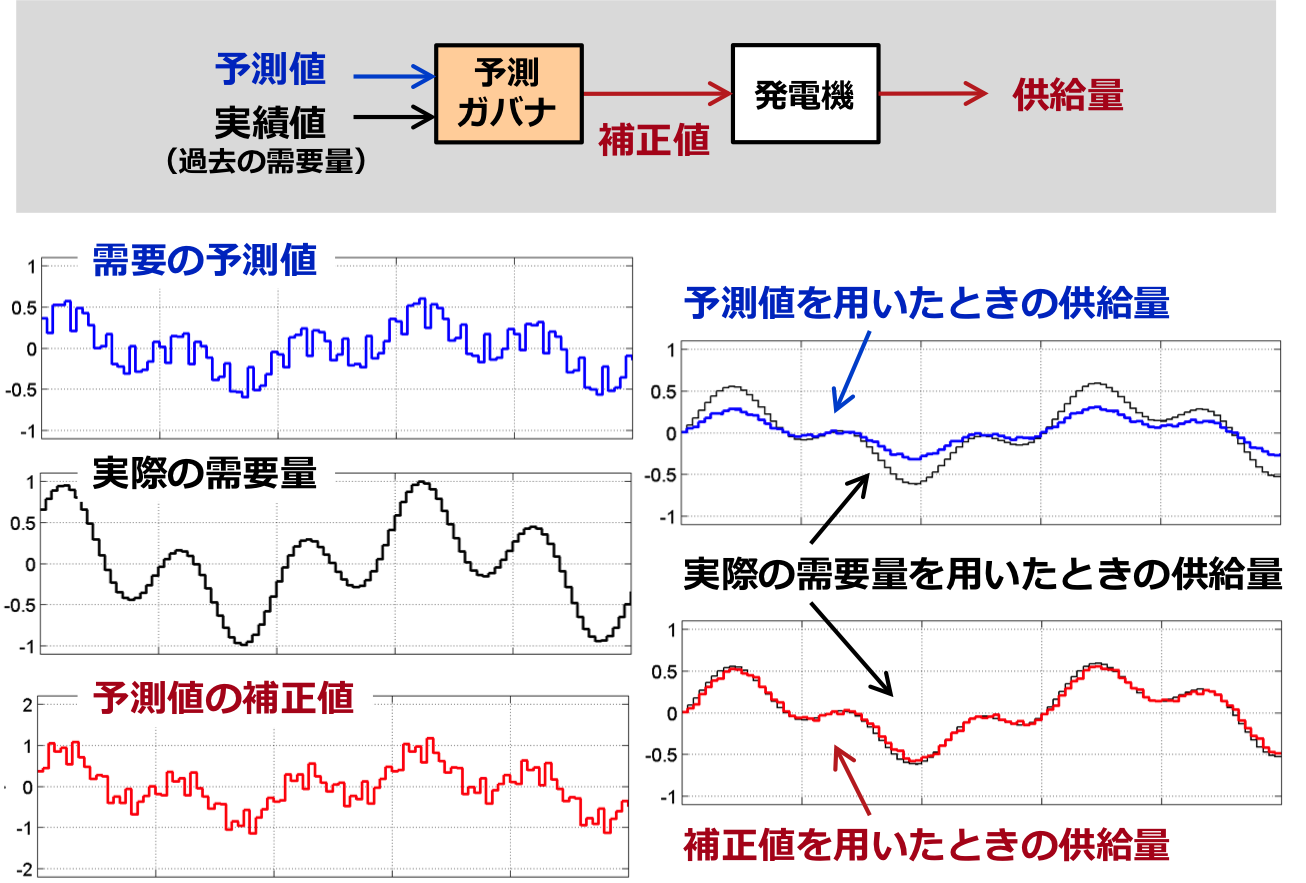
本研究では,従来手法で予測された信号を制御性能が向上するように適切に整形することを考えます.具体的には,「予測ガバナ」と呼ぶ信号整形機構を提案しました.これは,過去の真の信号と制御対象のダイナミクス情報を利用して,予測信号を整形するものです.本研究では,その最適設計問題を定式化し,最適解を解析的に導出しています.
制御の観点から予測信号を整形するという問題は,これまでに考えられておらず,本研究が初めての取り組みです.そして,最適設計問題の解を解析的に導出し,予測ガバナの性能限界を明らかにしたこと は,本研究が初めてです.
また,本研究の成果は,目標値がリアルタイムに計算できない場合 や センサにむだ時間が含まれる場合などの実問題への応用が期待できます.実際,電力同時同量制御への応用に関して,特許を出願しています.
[:]