[:ja]
三叉ヘビ型ロボット
三叉ヘビ型ロボットとは,従来のヘビ型ロボットを3体,中央のベースリンクを介して三叉状に連結した移動ロボットです.このロボットは速度拘束をもつ非ホロノミックシステムで,その運動学モデルは2ジェネレータのdrift-freeシステムと呼ばれる非線形状態方程式で表されます(車両は1ジェネレータ). 先行研究では,可制御性解析とホロノミーの原理に基づいて推進原理を明らかにし,周期入力による制御手法を提案しています.
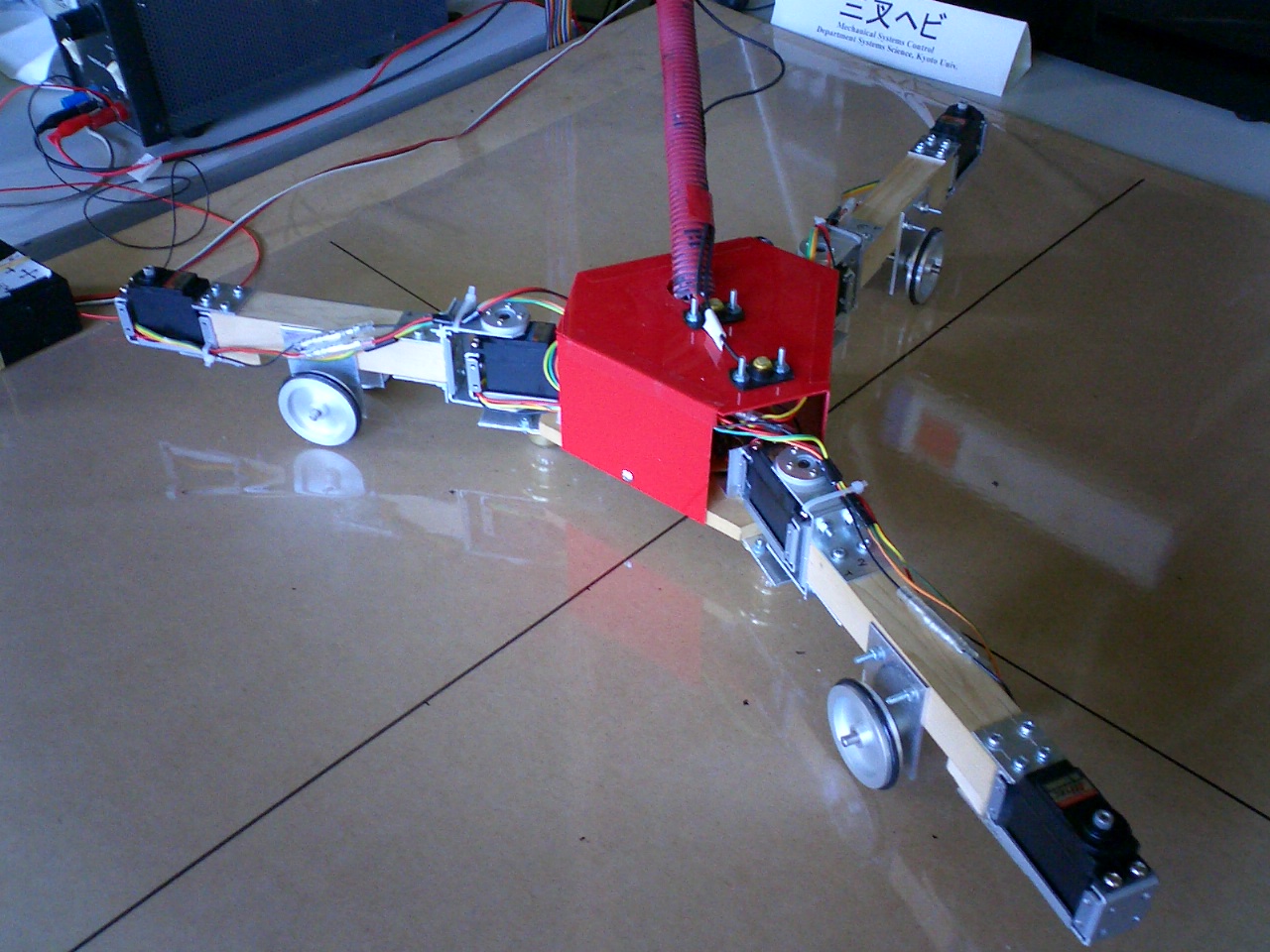
1リンクの三叉ヘビ型ロボット
各足が1リンクの三叉ヘビを製作しました(下図左は,M1の夏休みの工作,右は,M1の研究テーマとして製作).そして,先行研究の制御則の実験検証を行いました.また,新しいフィードフォワード制御則を提案し Point-to-Point フィードバック制御,軌道追従制御なども実現しています.

| 回転制御 | 並進制御 |
| 回転制御(1ステップ) | Point-to-Point フィードバック制御 |
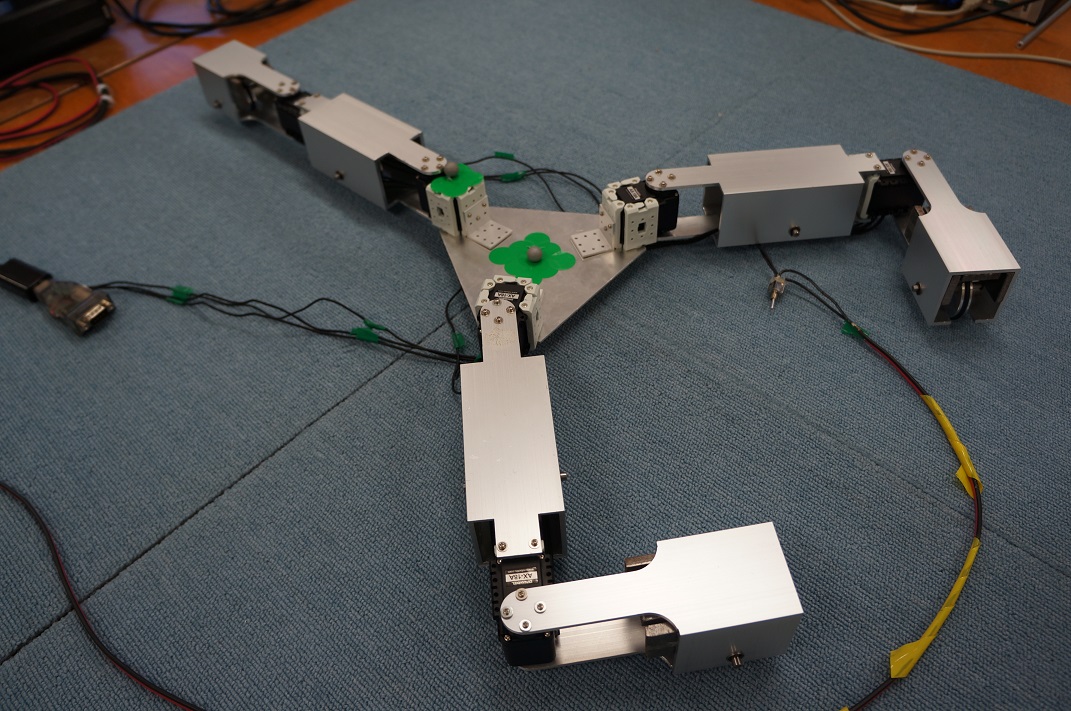
2リンクの三叉ヘビ型ロボット
各足が2リンクの三叉ヘビを製作しました.そして,フィードフォワード制御やフィードバック制御の実験検証を行いました.
Trident Snake Robot
| [flv:2013/04/2step_rot_cw.flv 320 240] | [flv:2013/04/2step_trans_down.flv 320 240] |
| Rotation control | Translation control |
| [flv:2013/04/1step_rot.flv 320 240] | [flv:2013/04/ptop.flv 320 240] |
| Rotation control (1 step) | Point-to-Point feedback control |
[:]