研究のビジョン
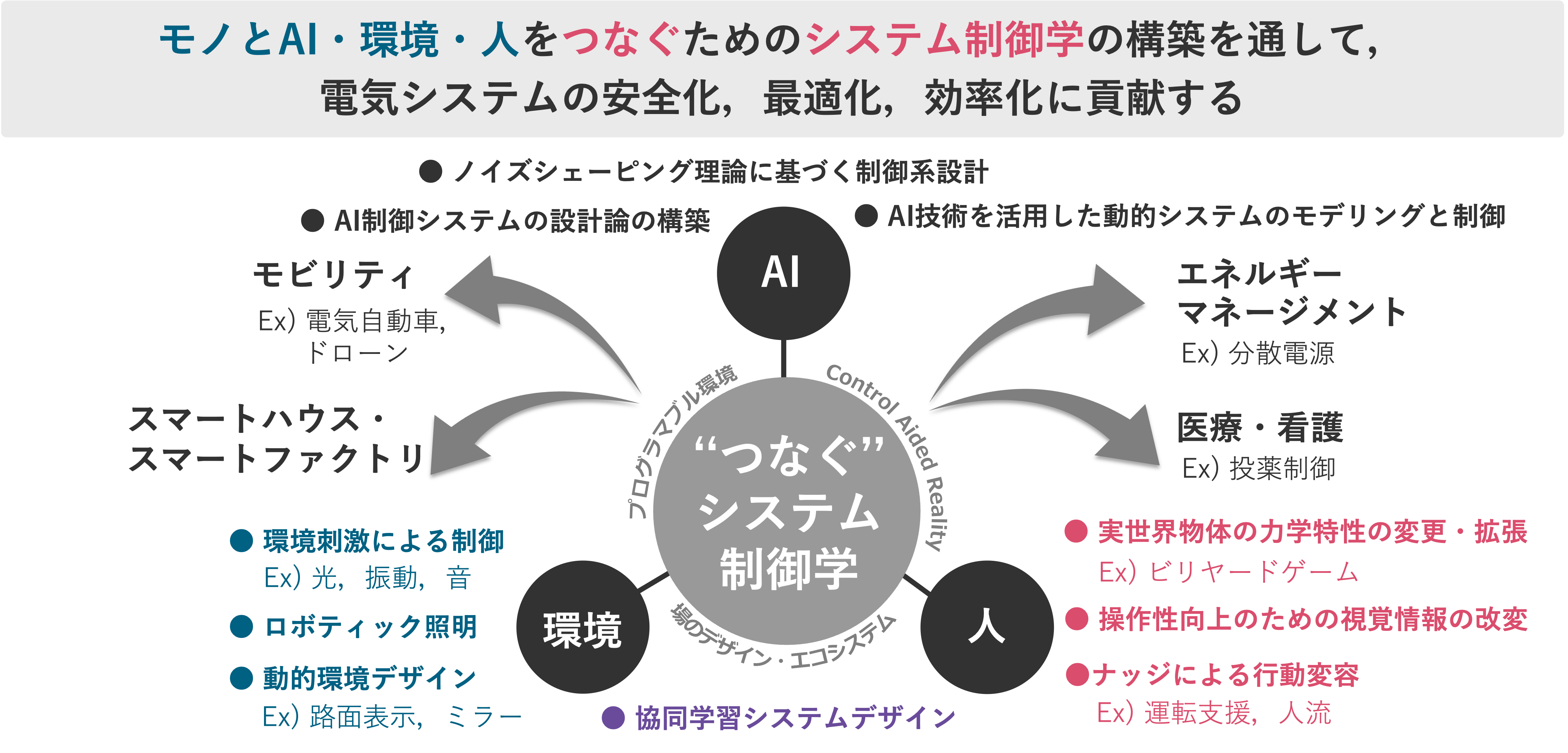
システム制御を柱として,制御システムの安全化・軽量化・省エネ化の技術を構築し,モビリティ,AIシステム,サイバーフィジカルヒューマンシステムなどに展開します。
代表的な研究課題
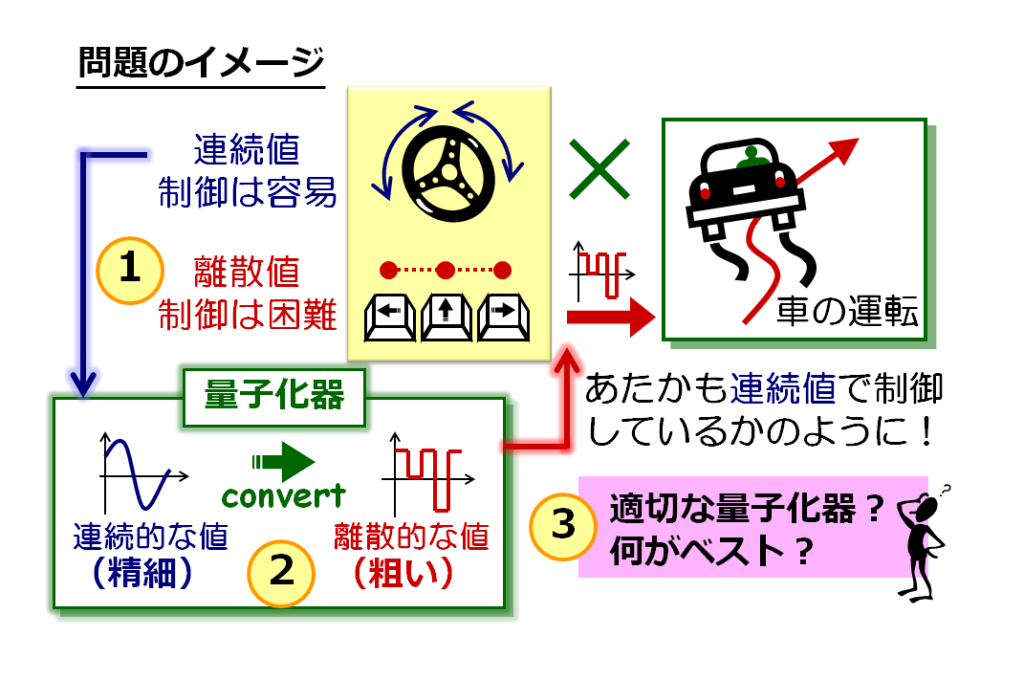
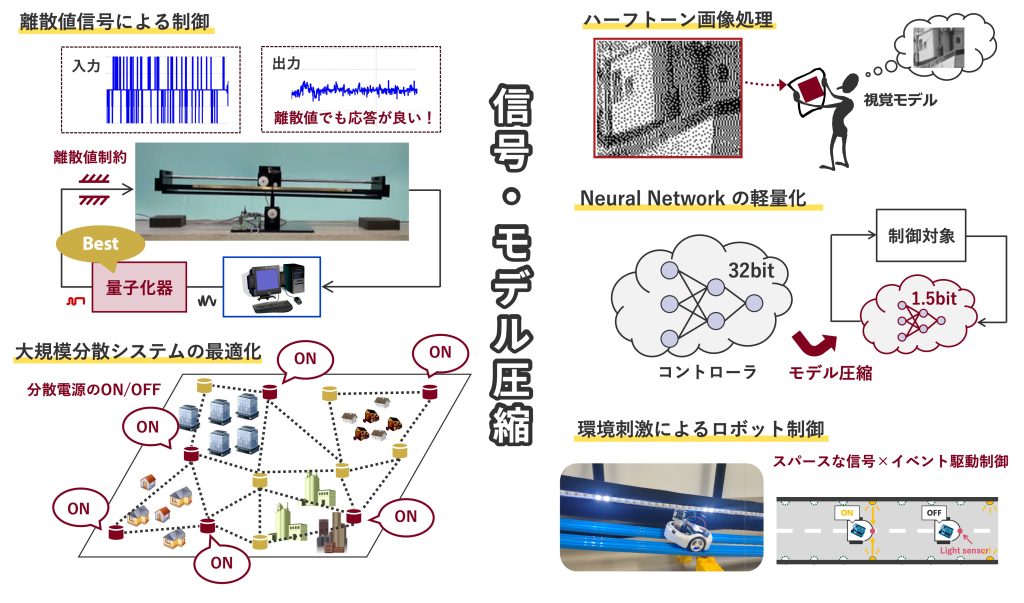
限られた情報しか使えない状況でも,精度の高い制御を可能にする技術の研究を進めています。一般に,信号やモデルの情報を圧縮すると,制御システムの性能が低下してしまいます。この性能劣化をできるだけ小さくするために,制御システムのモデル情報を活用してスマートに圧縮する「ノイズシェーピング量子化」を提案しています。この手法は,ロボット制御をはじめ,画像圧縮,分散最適化アルゴリズム,ニューラルネットワークの軽量化など,多様な分野へ展開しています。情報を賢く扱うことで,より省リソースで高機能なシステムの実現を目指しています。
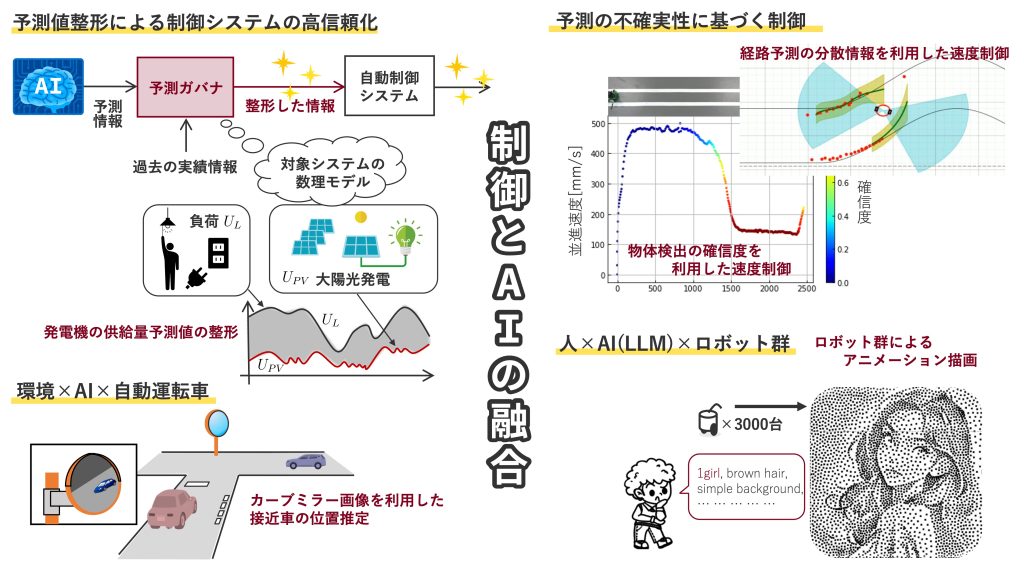
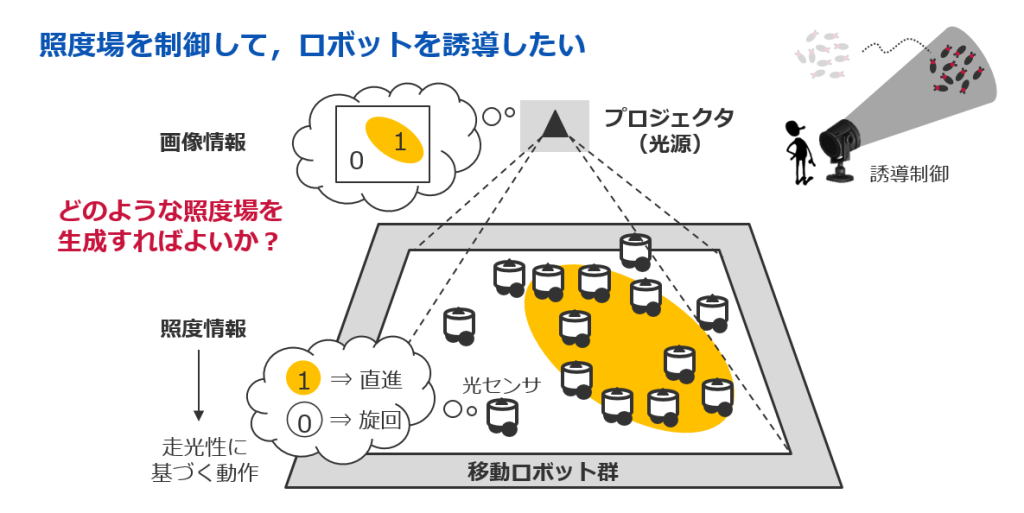
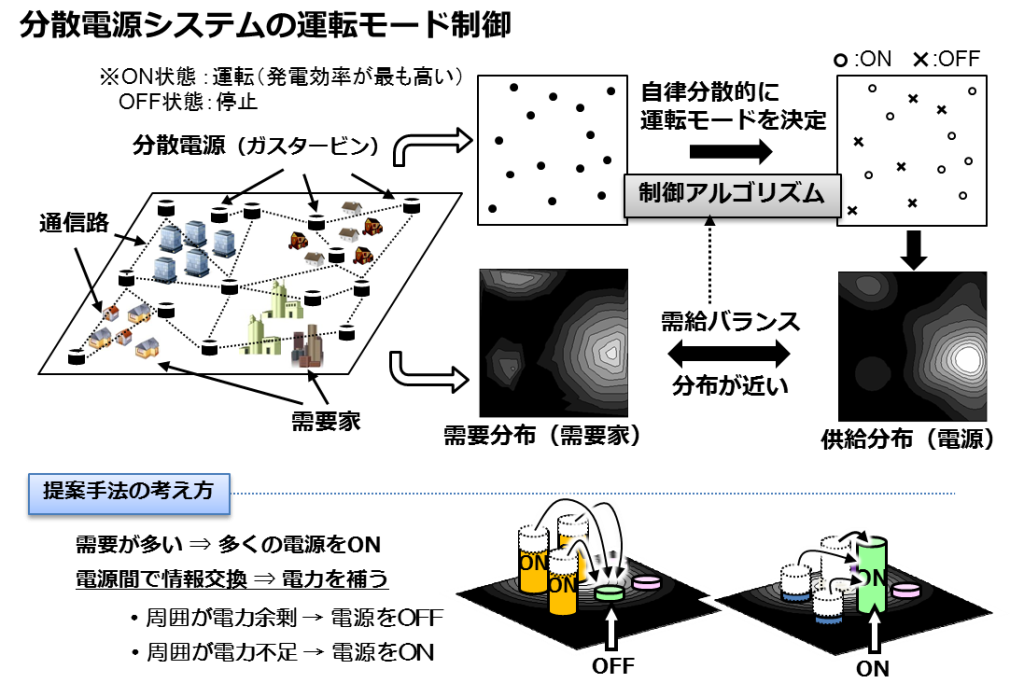
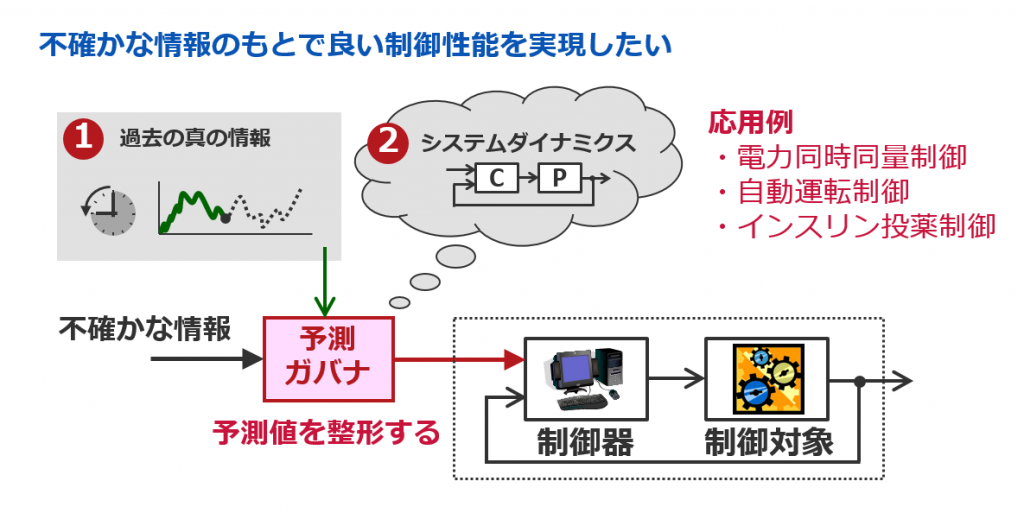
制御技術とAI技術を統合し,両者の強みを活かしたAI制御システムを構築する研究を進めています。AI予測を制御システムに活用する動きが加速していますが,AI予測には誤差が伴い,その影響を無視することはできません。そこで,予測誤差が制御性能に与える影響を抑えるために,予測値を適切に整形する「予測ガバナ」という技術を開発しています。そして,電力システムや自動運転システムなどへの応用を目指しています。さらに,AI予測の不確かさそのものを積極的に活用し,より信頼性の高い制御を実現する研究や,AIと人,AIと環境をつなぐテーマにも取り組んでいます。