背景
近年、機械学習や生成 AI の発展により、制御システムの設計・解析にデータ駆動型のアプローチが広く採用されるようになっています。本研究室では、従来のモデルベース制御の枠組みを拡張し、AI 技術を使って制御器や量子化器の設計、ロボット動作の最適化などを行うことを目指しています。
目的
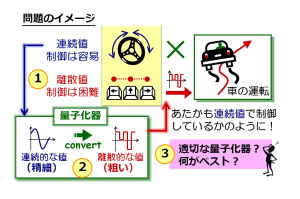
- データ駆動型動的量子化器の設計:プラントモデルに頼らず、入力–出力データのみを用いて最適な量子化器を設計し、制御対象やニューラルネットワークの高精度な離散化を実現する。
- 機械学習によるモデル化と制御:Neural ODE、LSTM、ガウス過程回帰などを用いて動的システムのモデルを構築し、オンライン制御や経路計画に活用する。
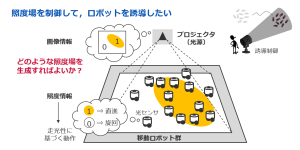
- 生成 AI とロボット制御の統合:生成 AI(例:DALL‑E)によって生成された画像をロボット群に提示することで、ユーザの指示に基づく柔軟なアニメーション表示を実現する。
- AI を活用したコマンドシェーピングや外乱補償:ベイズ最適化などを利用し、トルク制御や横風外乱補償のための信号整形を自動化する。
主なアプローチと成果
- データ駆動型動的量子化器・ニューラルネット量子化
- 動的量子化器のデータ駆動設計(D4Q)は、入力–出力データからノイズシェーピングフィルタを最適化し、非最小位相システムにも適用可能である。実機実験ではモデル化が困難なモータ制御系でも高精度な制御が実現した。
- ニューラルネットワークの重みを低ビットで量子化するため、学習データに基づくノイズシェーピング法を提案し、TDA による性能評価も行った。
- 機械学習によるモデル化・制御
- Neural ODE や LSTM を用いてロボットや非線形システムのダイナミクスを学習し、オンライン経路計画や制御に応用した(国内会議 2020–2021)。
- ガウス過程回帰を利用してロボットの経路計画を行い、環境不確実性を考慮した安全かつ効率的な経路を生成した(SICE 2020)。
- 生成 AI と分散ロボット制御(ChatRAD)
- テキストから画像を生成する生成 AI と多数のロボットを組み合わせ、ユーザの指示からアニメーションを生成・表示する ChatRAD システムを提案した。制御パラメータのチューニングにベイズ最適化を導入し、アニメーションの品質向上を実現した。
- AI ベースの信号整形と外乱補償
- トルク制御において、ベイズ最適化で設計したパルス信号をトルク指令に重畳するデータ駆動型コマンドシェーピングを提案し、ねじりダンパのトルク制御精度が向上した。
- 横風外乱補償では、外乱オブザーバにより推定した外乱を V2I 通信で共有し、予測ガバナで整形することで車両の安定性が向上した。
関連業績(AIと制御の融合)
| 年 | 業績タイトル | 主な内容 |
|---|---|---|
| 2026 | Data‑driven design of dynamic quantizers applicable to non‑minimum phase systems | モデルフリーな動的量子化器設計。 |
| 2026 | D4Q: Data‑Driven Design of Dynamic Quantizer | データ駆動型量子化器の提案と実験。 |
| 2025 | データ駆動型コマンドシェーピングを用いたねじりダンパのトルク制御 | ベイズ最適化によるコマンドシェーピング。 |
| 2025 | Crosswind Disturbance Compensation by Integrating Disturbance Estimation and V2I Communication | 横風外乱を予測ガバナと AI で補償。 |
| 2025 | A TDA‑based Performance Analysis for Neural Networks with Low‑bit Weights | ノイズシェーピング量子化と TDA の活用。 |
| 2025 | Performance Evaluation of ORB‑SLAM3 with Quantized Images | 動的量子化による SLAM のメモリ削減。 |
| 2025 | A Model‑Tuning Approach to Switching‑type Dynamic Quantizer for Nonlinear Systems | 非線形システム向け量子化器のモデル調整。 |
| 2024 | NQLib: A Python Library for Noise‑shaping Quantizer Synthesis | 量子化器設計ソフトウェア。 |
| 2024 | Neural network approximation and model quantization for MPC towards edge implementation(国際会議) | MPC への NN モデル量子化。 |
| 2021 | Prediction governors: optimal solutions and application to electric power balancing control | 予測ガバナの理論。 |
| 2021 | Neural‑ODE を用いたモデルベース学習制御(国内会議) | Neural ODE を使ったモデル学習。 |
| 2020 | ガウス過程回帰を用いた移動ロボットのオンライン経路計画 | GP を使った経路計画。 |
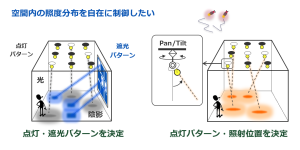
| 2018 | Development of a distributed lighting control system | 分散照明システムの開発。 |