背景
人間やロボットの行動は、視覚・音・振動・光など多様な環境刺激に影響を受けます。本研究室では、こうした刺激を巧みに制御に組み込むことで、操作者の操作負荷を低減したり、ロボットの安全かつ効率的な運動を実現することを目指しています。
目的
- 視覚情報の改変:対象の状態をそのまま見せるのではなく、未来予測や強調表示などへ変換し、操作者の反応を改善する。
- 感覚刺激による誘導:ペースメーカーライトや振動刺激などの環境刺激を用いて人間やロボットの動作を誘導し、疲労の軽減や安全性向上に寄与する。
- 環境外乱への対応:横風や悪路など外部環境からの刺激を検知・補正することで、ロボットや車両の性能を向上させる。
主なアプローチと成果
- 視覚情報改変による操作性向上
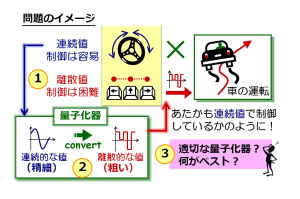
- 倒立振子制御のゲームにおいて、0.6 秒先の予測状態を表示することで操作性が向上し、操作入力が減少した。
- 強化学習への応用では、観測データを加工して学習効率を改善し、安定化制御の成功率が向上した。
- ペースメーカーライト・振動刺激
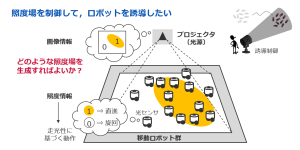
- 移動ロボットの速度制御において、道路に設置したライトの色や明滅周期を変化させることで操作者の速度を誘導し、渋滞抑制や安全走行を支援した。
- 振動刺激による速度誘導では、人間が感じる振動の強さや周波数を変えて速度を調節する方法を検討した。
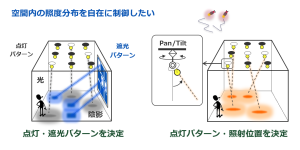
- 照明・視線誘導とナビゲーション
- 分散照明システムを利用したオン/オフパターン制御や三次元照明誘導では、光の強度や位置を調整してロボットや人間の視線を誘導し、移動経路を安全に案内した。
- 錯視画像や霧除去アルゴリズムを用いてドローンの自律飛行をサポートする研究も行われている(国内会議 2025)。
- 環境外乱補償
- 横風外乱に対する補償では、外乱オブザーバと V2I 通信を組み合わせ、予測ガバナで外乱推定値を整形することで車両の安全性を向上させた。
関連業績(環境刺激)
| 年 | 業績タイトル | 主な内容 |
|---|---|---|
| 2026 | 人間機械系における視覚情報改変による操作性向上効果の線形モデル解析 | 倒立振子ゲームの線形モデル解析。 |
| 2025 | Operability improvement of human‑machine systems by altering visual information | 未来予測表示による操作性向上の実験。 |
| 2024 | 情報改変による強化学習の効率化 | 強化学習における観測情報改変。 |
| 2023 | ペースメーカーライトを利用した移動ロボットの速度制御 | 視覚刺激で速度誘導。 |
| 2023 | 振動刺激を利用した移動ロボットの速度制御 | 振動刺激で速度誘導。 |
| 2023 | 三次元可動照明システムの配置・点灯パターン制御 | 照明による視線誘導とナビゲーション。 |
| 2025 | Crosswind Disturbance Compensation by Integrating Disturbance Estimation and V2I Communication | 外乱を環境刺激として捉え補償。 |
| その他 | 錯視画像、霧除去によるドローン誘導など | 環境刺激を利用した制御。 |